

Nachdem Ich bei Ebay über ein sehr verlockendes Angebot für einen X50e Bausatz inkl. Motor gestolpert war, konnte ich einfach nicht wiederstehen.
Um das erworbene Set zu vervollständigen benötigte ich natürlich auch noch 4 Servos, einen Regler und ein FBL System.
Bei den Servos habe ich mich nach längerer Suche auf Grund der durchweg guten Kritiken für die HBS Baureihe von Graupner entschieden. Für die Taumelscheibe fiel die Wahl auf 3 HBS 880MG und für das Heck auf das schnellere HBS 770MG. Als FBL System wollte ich eigentlich erst ein vorhandenes 3GX einsetzen, jedoch entschied ich mich letztendlich dann doch für das AR7200BX von Spektrum, da mir die Regelung des Microbeast doch besser gefällt. Nun brauchte ich nur noch einen Regler. Hier war die Auswahl doch recht einfach. Kontronik und YGE sind zwar die erste Liga, jedoch sind die Preise meiner Meinung nach absolut überzogen. Aus diesem Grund habe ich mich dann für den neuen CastleCreations Edge 120HV entschieden. Dieser ist vom Preis Leistungs Verhältnis wirklich super und die Meinungen zu dem Regler sind doch durchweg positiv. Da ich erst einmal nur mit 6S fliegen will ist der Regler zwar überdimensioniert, jedoch bin ich damit direkt für eine Aufrüstung auf 10S oder 12S gut gerüstet. Damit waren nun alle Komponenten zusammen und es konnte mit dem Aufbau losgehen.
Der Bausatz kommt wie gewohnt sauber Verpackt in einem Umkarton für 3 kleinere Verpackungen daher. Die einzelnen Baugruppen sind wiederum wie bei allen namenhaften Herstellern in Plastikbeuteln verpackt. Was direkt ins Auge sticht, ist das auch bei Thundertiger mittlerweile Inbusschrauben Einzug gehalten haben und man vergeblich nach den Raptor typischen Kreuzschlitzschrauben sucht.
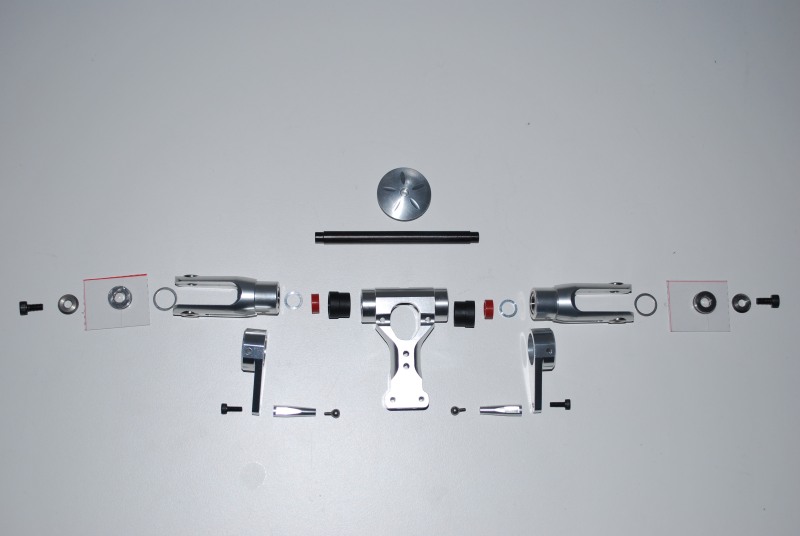
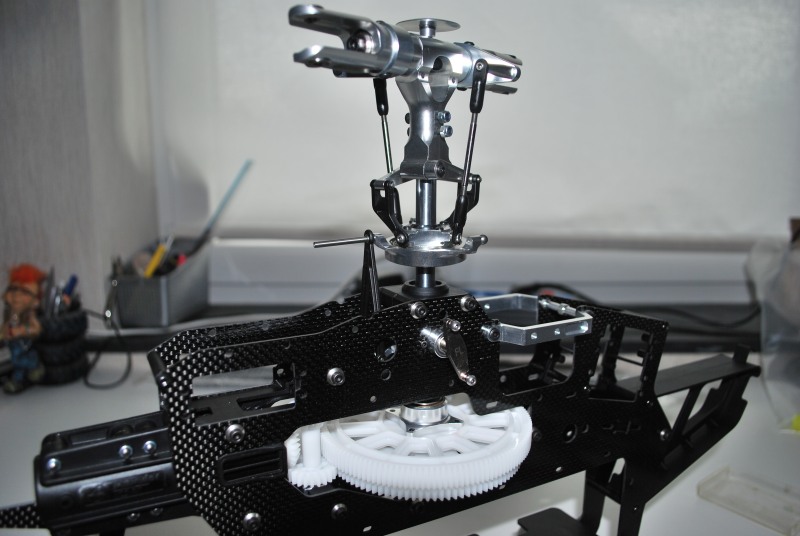
Der Aufbau beginnt mit dem Rotorkopf. Dieser ist komplett aus Aluminium gefräst und wirkt sehr Edel. Die Passgenauigkeit ist wie bei Thundertiger gewohnt sehr gut und die Anzahl der Einzelteile ist durch die FBL Ausführung recht überschaubar. Aus Gründen der Gewichtsreduktion wurde das Zentralstück mit einer großen Aussparung versehen, welche dem ganzen Kopf optisch schon eine besondere Note verpasst. Die Blattlagergummis sind zweigeteilt ausgelegt und bestehen aus einem harten schwarzen Innengummi und einem kleineren etwas weicheren roten Außengummi. Nach nur wenigen Handgriffen hält man einen sehr ansehnlichen spielfreien und schön designten FBL Rotorkopf in der Hand.
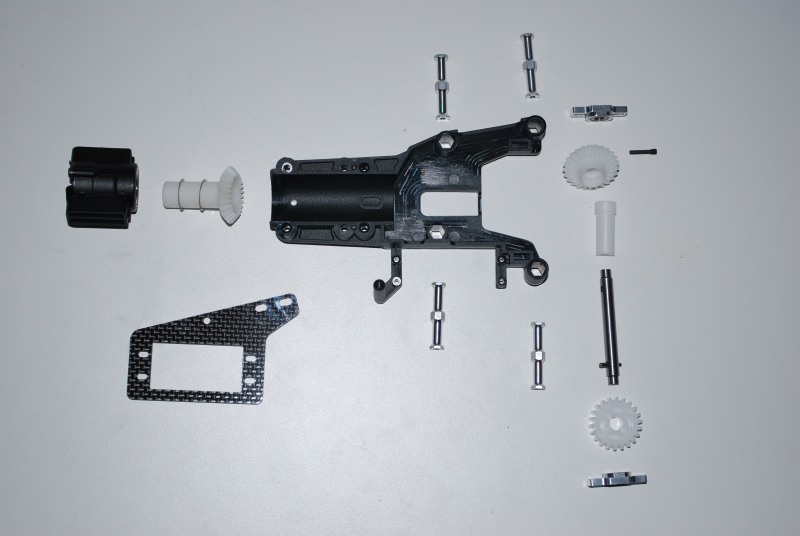
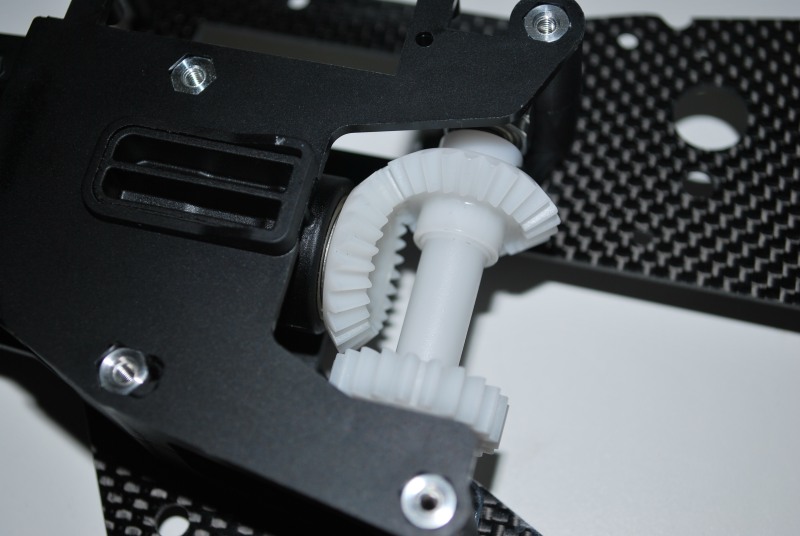
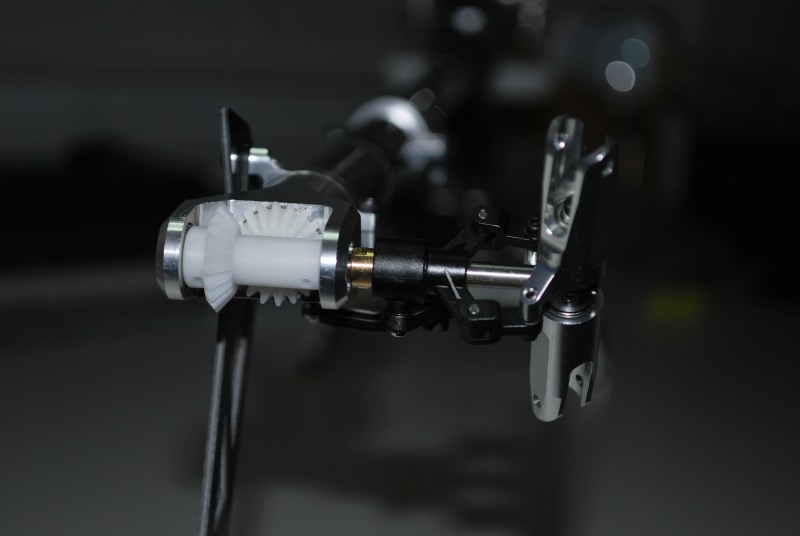
Als nächstes steht nun der Zusammenbau der Heckaufnahme mit dem vorderen Winkelgetriebe auf dem Programm. Auch hier passen die Komponenten perfekt. Die eigentliche Aufnahme besteht aus einem Kunststoff Spritzgussteil, welches sauber verarbeitet ist und sehr passgenaue Aufnahmen für die aus Alu gefrästen Lagerhalter hat. Bei dieser Baugruppe ist es das erste mal wichtig die Anleitung etwas genauer zu lesen, da dort darauf hingewiesen wird, dass die Anzahl der Distanzscheiben davon abhängt wie groß das Zahnflankenspiel ausfällt. In meinem Fall bin ich mit nur einer Scheibe ausgekommen. Durch den Einbau der zweiten war das Winkelgetriebe schon so stramm, dass es sich nicht mehr frei drehen ließ.
Weiter geht es danach mit der der Hauptbaugruppe, dem Chassi. Dieses besteht wie bei den meisten aktuellen Helis aus zwei sehr stabilen CFK Platten welche sauber geschnitten sind und in meinem Fall keine scharfen Kanten besaßen. Ein aufwendiges brechen dieser Kanten konnte also endfallen. Beide Seitenteile sind identisch und werden erst durch das anbringen weitere Komponenten der entsprechenden Seite zugeordnet. Die Chassi Verbinder bestehen aus Aluminium und werden teilweise in die Heckaufnahme und den RC-Vorbau eingeschoben um die Komponenten mit den CFK Seitenplatten fest zu verbinden. Einzig die Kunststoff Servohalter könnten etwas stabiler sein. Hier muss man beim verschrauben mit den CFK Seitenteilen darauf achten, das die Schraubhülsen ein wenig fixiert werden und die Selbstschneidenden Schrauben feinfühlig eingedreht werden. Macht man dieses nicht so besteht die Gefahr, dass das doch recht dünne Material bricht. Ist der Servoträger aber erst einmal verschraubt, so erhält man eine Stabile und feste Aufnahme für die beiden vorderen Servos und eine gut zugängliche Platzform für das Flybarless System. Der RC Vorbau ist ebenfalls aus Kunststoff und bietet genügend Platz um Komponenten wie Empfänger, Bec, und Regler auf zu nehmen.
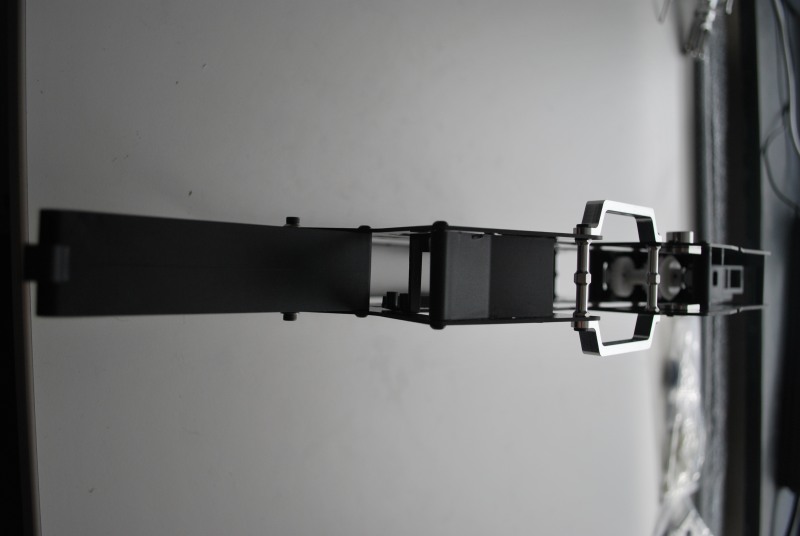
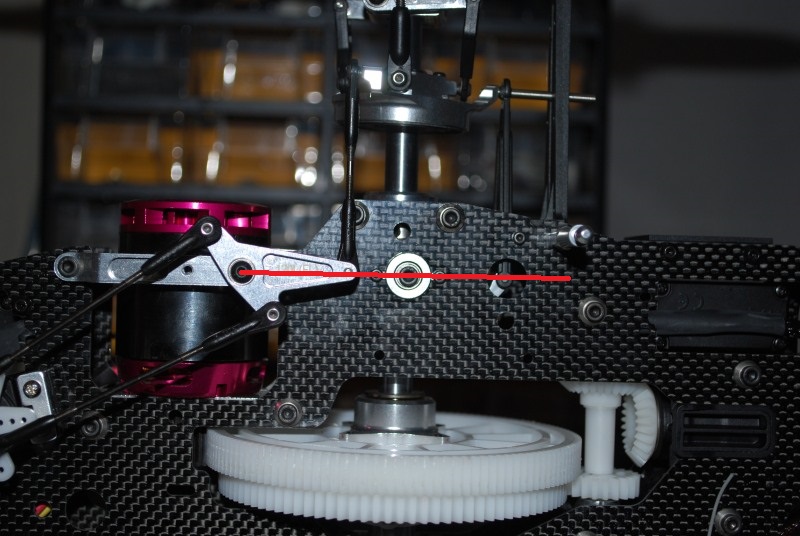
Ein Optisch sehr schönes Detail sind auch die beiden Alu Bügel, welche einerseits als Versteifung für das Chassi und Gleichzeitig als Befestigung für die PushPull Umlenkhebel dienen. Hierbei gibt es auf jeder Seite zwei verschiedene Bohrungen für eine 120° und eine optionale 140° Taumelscheibenanlenkung. Zwischen den beiden Bügeln findet später auch der Motor seinen Platz. Hier hat Thundertiger mit 55mm genügend Freiraum geschaffen, um selbst Motoren der 700er Klasse zu verwenden. Ist das Chassi erst einmal komplett verschraubt und steht vor einem, dann fällt das erste mal die extrem schmale Silhouette des X50 Chassi ins Auge.
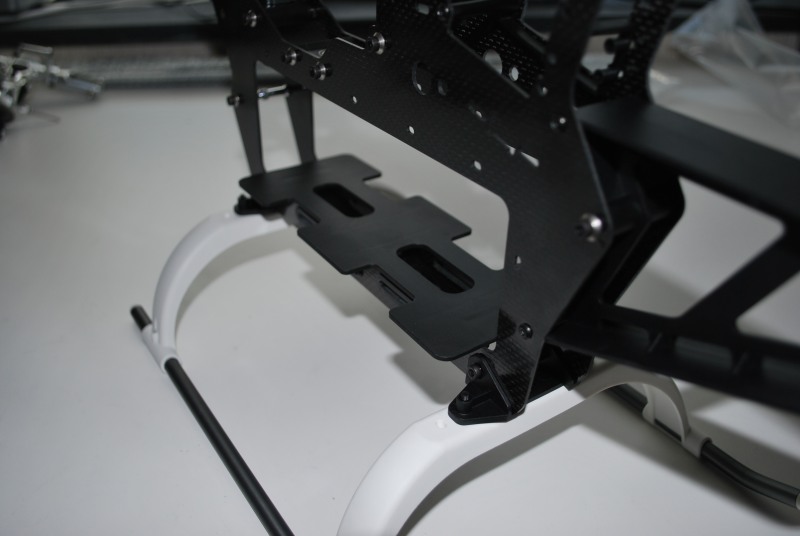
Beim Landegestell bekommt man als Raptor Anhänger dann kurzzeitig nostalgische Gefühle. Die Kufen und das Landegestell sehen immer noch genau so aus wie beim alten Raptor. Doch beim genaueren hinsehen fällt auf, das auch hier die Leichtbauweise Einzug gehalten hat. Das Landegestell ist eine komplette Neukonstruktion und besteht aus einem sehr leichten aber stabilen PVC U Profil. Auch hier wurde konsequent auf Leichtbauweise geachtet.
Bei der Akkuauflage musste dann das erste mal etwas Sanfte Gewalt eingesetzt werden um die Passgenauigkeit zu erreichen. Die Auflage muss in Schlitze des CFK Chassi eingeführt werden und hier haben es die Konstrukteure wohl etwas zu genau mit der saugenden Fügung genommen. Man kann hier eher von einer klemmenden Fügung reden, jedoch mit etwas mehr sanften Druck konnten auch diese Teile zusammengefügt und verschraubt werden. Die Akkuauflage selber ist recht breit und bietet genug Platz für diverse Akku größen, welche mit den üblichen Thundertiger Klettbändern befestigt werden. Akku Packs bis 12S/5000mAh sollten auf der Auflage problemlos sicheren Halt finden, solange diese eine Länge von 190mm und eine Höhe von 58 mm nicht überschreiten.
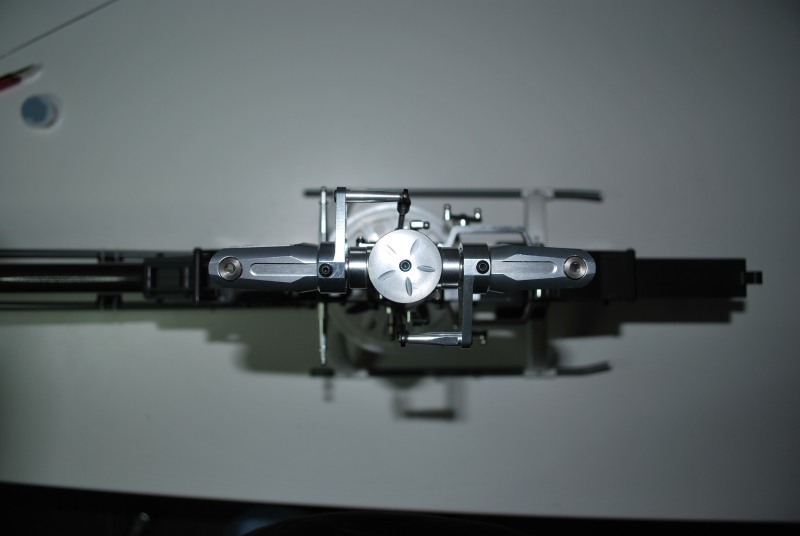
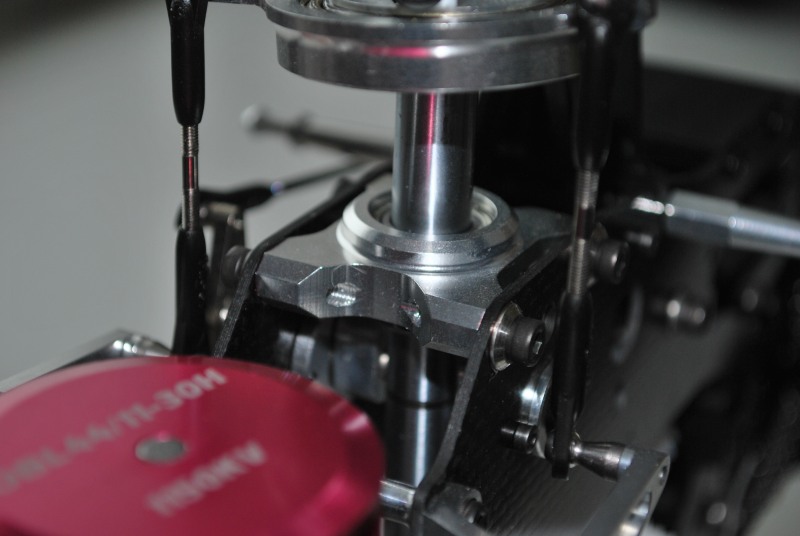
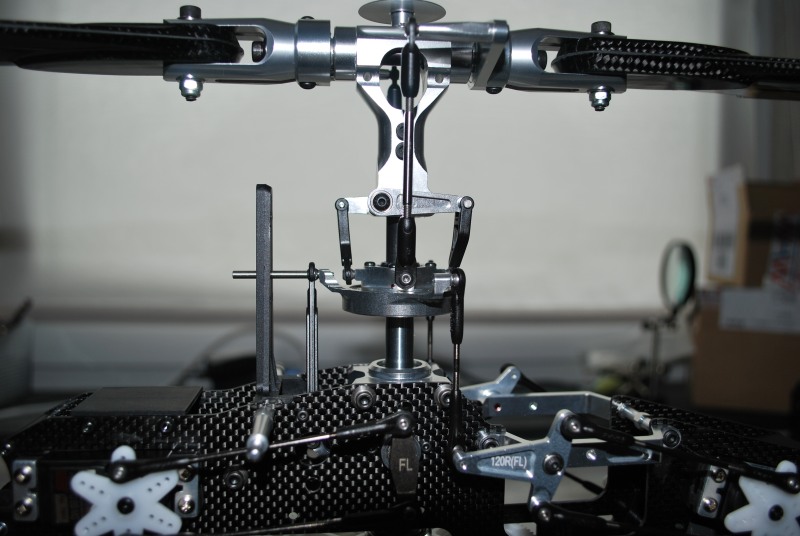
Nachdem das Chassi nun auf eigenen Beinen steht, geht es an die Hochzeit. Hier wird als erstes die Hintere Taumelscheiben An Lenkung montiert. Danach kann die Rotorwelle und das Antriebsritzel samt Heck Ritzel montiert werden. Ein wenig kniffelig ist jedoch die spielfreie Montage des oberen Stellringes. Hier wird in der Anleitung ein Maß angegeben, auf das dieser Ring eingestellt werden soll. Jedoch hatte bei mir der Ring immer noch etwas spiel zum oberen Lagerbock, wodurch man die Rotorwelle ca. 1mm hochziehen konnte. Gelöst habe ich das ganze indem ich den Lagerbock wieder gelöst habe und danach den Stellring etwas zu hoch befestigt habe. Hierdurch kann man den Lagerbock mit etwas gefühlvoller Kraft unter Spannung in seine Position bringen. Danach löst man ganz vorsichtig die Madenschraube im Stellring und dadurch entspannt sich die ganze Konstruktion. Wenn man gefühlvoll vorgegangen ist hat man nun eine absolut spielfrei Passung. Was bei dem oberen und unteren Lagerbock jedoch zu bemängeln ist, ist das Material. Das Original besteht hierbei nur aus PVC und dürfte nach einiger Zeit den Belastungen nachgeben und spiel bekommen. Also Zubehörteil erhält man jedoch beide Lagerböcke aus Alu, welche ich direkt montiert habe. Hier hätte Thundertiger gleich diese Alu Version verbauen können.
Zuletzt werden dann noch die Push/Pull Umlenkungen montiert. Hier ist zu beachten, dass die Hebel unterschiedlich sind. Am Aufdruck auf den Hebeln ist erkennbar an welcher Seite welcher Hebel montiert werden soll.
Nachdem das Chassi nun weitestgehend fertig ist, muss noch das Heck aufgebaut werden. Hier beginnt man wie Üblich mit dem Zusammenbau des Heckrotors, welcher fast komplett aus Alu besteht und vom Aufbau her unspektakulär ist. Beim Winkelgetriebe für den Heckantrieb, muss man jedoch etwas achtsam sein. Hier ist mir beim Zusammenbau aufgefallen, dass das letzte Lager vor dem Winkelgetriebe irgendwie rastete und sich nicht sauber drehen ließ. Da ich zuerst von einem Defekt des Lagers ausgegangen bin habe ich mich dann an den Thundertiger Support gewendet, der mir auch direkt ein Ersatzlager zugeschickt hat. In der Hand lies sich dieses neue Lager dann einwandfrei leichtgängig drehen, jedoch nach dem Einbau zeigte dieses dann genau das gleiche Verhalten wie das alte Lager. Eine genauere Ursachenforschung ergab das hier anscheinend ein Konstruktionsfehler vorliegt. Laut Anleitung wird der Arm für die Heckanlenkung mit der Schraube "HMC25-8B (M2,5x8)" befestigt. Diese Schraube ist jedoch etwas zu lang und drückt deshalb auf den äußeren Ring des Lagers, wodurch dieses nicht mehr sauber drehen kann. Ein kürzen der Schraube um ca. 1mm brachte hier Abhilfe. Danach lief die Heckeinheit wie erwartet leichtgängig. Das letzte größere Bauteil ist dann noch der Starrantrieb welcher, wie auch von anderen Modellen gewohnt, aus einem dünnwandigen Rohr besteht. Auf dieses Rohr wird dann laut Anleitung ein Lager aufgeschoben und mit etwas Sekundenkleber fixiert. Beim Verkleben ist unbedingt darauf zu achten, das das Lager nicht mittig fixiert wird da das Antriebsrohr sonnst anfangen kann zu schwingen. Da in diversen Foren zu lesen war, das es besser sei ein zweites Lager ein zu bauen um diesem schwingen entgegen zu wirken, habe ich dieses direkt getan.
Das Heck Rohr selber wird danach wie auch bei den alten Raptoren in das Chassi eingeschoben und durch anziehen der Schrauben an der Winkelgetriebeeinheit fixiert. Zusätzlich da zu wird das Rohr noch durch zwei kurze Schrauben gegen eine mögliche Verdrehung gesichert. Was beim X50 sehr gut gelöst ist, ist die Fixierung der Heckanlenkung. Hierfür werden 3 Halteschellen auf das Heckrohr aufgeschoben und der 2mm Anlenkdraht hindurchgeführt. Die Schellen lässt man besten erst mal locker auf dem Rohr, bis das Heck sauber justiert wurde und auch die An Lenkung am Servo hergestellt wurde. Die Schellen richten sich hierdurch sauber von selber aus und ergeben nach dem festziehen eine schöne gradlinige An Lenkung des Hecks.
Damit ist der Mechanische Aufbau auch schon abgeschlossen. Wenn man sich sehr viel Zeit nimmt und alles verantwortungsvoll kontrolliert, braucht man ca. 2-3 Abende um dieses Baustadium zu erreichen.
Einbau der RC Komponenten
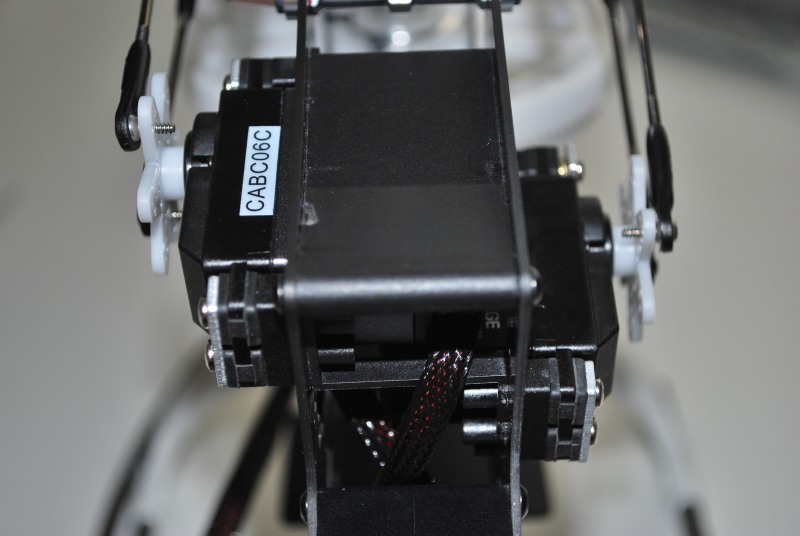
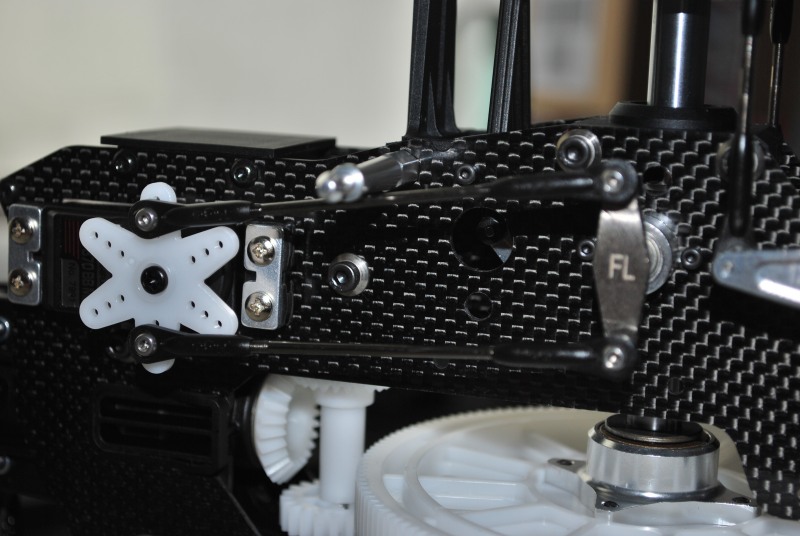
Beim Einbau der Servos fällt einem dann ein sehr nettes Detail auf. Die Servos werden nicht wie bei Anderen Herstellern üblich durch gegenplatten am Chassi fixiert, sondern mit den Halteschrauben direkt in die Halterahmen geschraubt. Diese Lösung hat mir sehr gut gefallen, da man nicht erst umständlich die Gegenplatten einbringen muss.
Durch das Extrem schmale Chassi ist es bei den Roll Servos notwendig diese mit Distanzblöcken zu verbauen um eine saubere und exakte An Lenkung zu erhalten. Um eine saubere Grundeinstellung der Taumelscheibe zu erreichen stellt man einfach die Push/Pull Umlenkhebel so ein, das alle Drehpunkte auf einer Ebene liegen. Ist dies der Fall, so sollten die Anlenkgestänge zu den Servos ungefähr die gleiche Länge haben und ein sauberes Trapez beschreiben. Danach Arbeitet man sich einfach wie gewohnt von unten nach oben und erhält am Schluss eine saubere Nulllage.
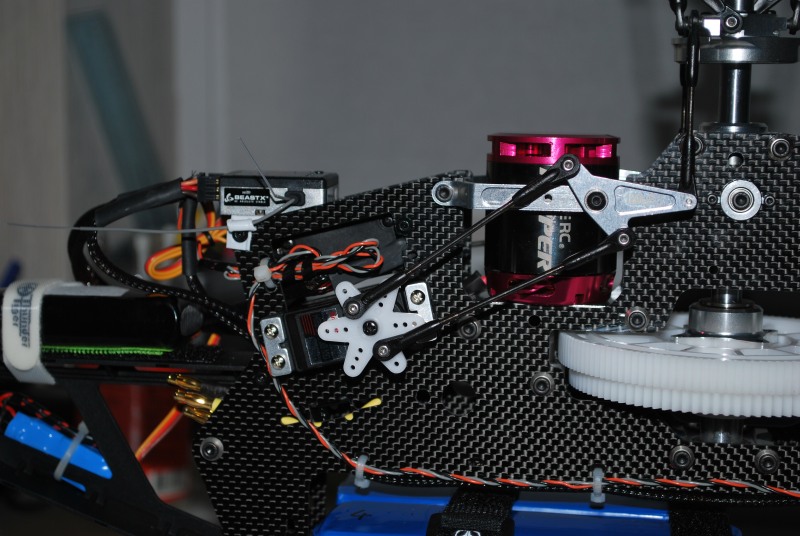
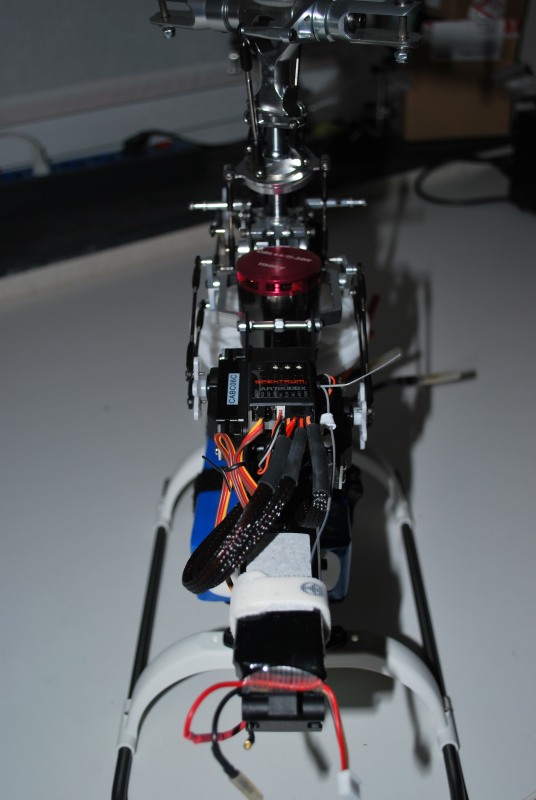
Der Einbau der Restlichen Komponenten ist danach eigentlich nur noch Formsache. Auf und am RC Vorbau existiert genügend Platz um alle Komponenten gut unter zu bringen. Für das Flybarless System hat TT gleich 3 mögliche Positionen vorgesehen. Eine auf einer Plattform über dem Nick Servo, die zweite auf der Plattform über den Roll Servos und wem das noch nicht reicht, der wird auf dem eigentlichen RC Vorbau bestimmt ein weiteres Plätzchen finden. Ich persönlich habe mich für den Platz über den Roll Servos entschieden, da die Zugänglichkeit für Einstellarbeiten hier optimal ist und der System selber durch die Haube ein wenig geschützt wird. Wie zu sehen ist, steht der von mir verwendete AR7200BX zwar ein paar Millimeter nach vorne über, die Funktion ist davon jedoch nicht beeinträchtigt.
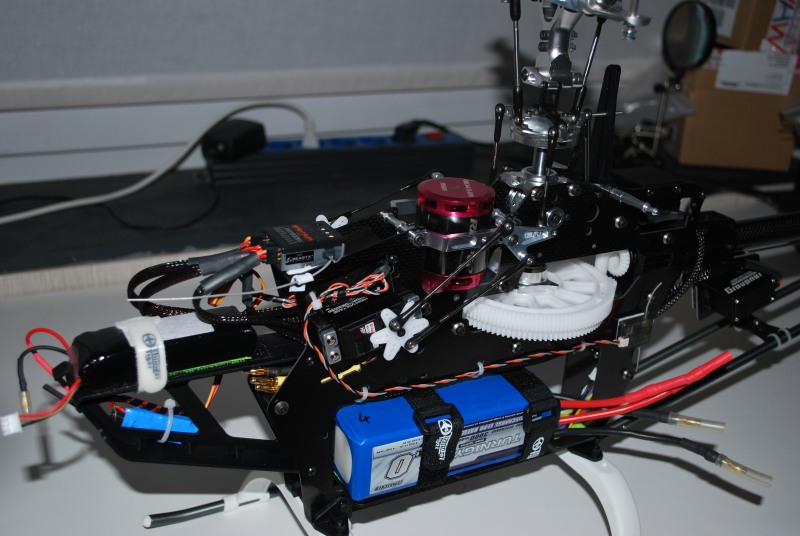
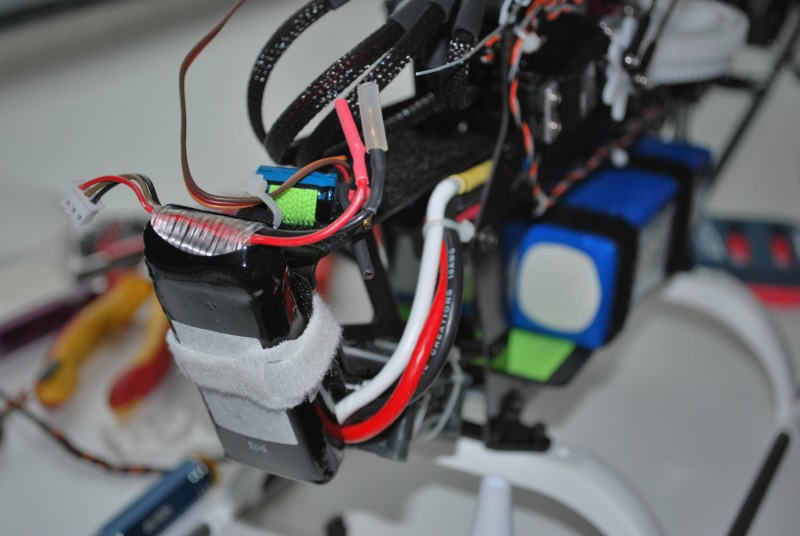
Wer den X50 mit 6S fliegen möchte, sollte versuchen alle Komponenten möglichst weit vorne unter zu bringen um einen passenden Schwerpunkt zu erreichen. Da ich aus Sicherheitsgründen sowieso am liebsten mit einem separaten Akku als Empfängerstrom Versorgung fliege, kam mir dieses recht gelegen und der geplante 2S Lipo erwies sich als optimales Trimmgewicht. Frontal am RC Ausleger befestigt, bringt dieser genau das notwendige Gewicht um einen Optimalen Schwerpunkt zu erhalten. Die Verlegung der Anschlusskabel ist beim X50 auch ein Kinderspiel. Es gibt im Chassi genug Platz und auch genug Fixierungspunkte um eine sehr akkurate und fast unsichtbare Verlegung zu realisieren.
Einstellen und einfliegen:
Das einstellen verlief eigentlich recht unspektakulär. Rotorkopf sauber auf 0° einstellen und das Setup des Microbeast durchspielen. Bei den Ruderhörnern musste ich noch ein Loch weiter nach innen gehen, da sonst der gesteuerte Winkel für das Beast zu groß war. Der Regler habe ich auf 3 feste Drehzahlen programmiert, 1500,1800 und 2000 Umdrehungen. Mit hilfe der Software und des USB interfaces ist dies im vergleich zu der fummellei mit meiner alten Kontronik Progcard II ein Kinderspiel. Alles schön in Ruhe einstellen auf übertragen drücken und gut ist. Blieb nur noch die Senderprogrammierung. Hier habe ich einfach mal alle einstellungen von meinem E550 übernommen, was sich als vollkommen ok herausgestellt hat. Einzig die Pitch und Gas werte, so wie die Taumelscheibenart mussten angepasst werden.
So auf zum Jungfernflug. Akku angeschlossen, Gas freigegeben, ein beherzter Pitch Stoß und schon hängt der X50e absolut stabil und ruhig vor mir in der Luft. Auf anhieb haben alle einstellungen gepasst und noch nicht einmal der Spurlauf musste korrigiert werden. 2 großeräumige kreise später erwiche ich mich sogar schon dabei das ich die ganze Fuhre in den ersten 540er jage. Der Rappen geht wie eine Eins und der unterschied zum alten 620er ist enorm. Ein paar Rollen und Loops später kam dann allerdings die Ernüchterung, der Timer erinnerte mich daran das die ersten 5 Minuten bereits rum waren und es Zeit zum landen war. Die Kontrolle des Lipos zeigt dann das genau 3800mAh aus dem 5000er Lipo entommen waren. Also genau passend wenn man die 20% Restkapazität nicht unterschreiten will.
Der zweite Flug sorgte dann jedoch recht schnell für ernüchterung. Gas freigeben, Pitch rein und Motor und RC anlage aus. Gott sei dank waren es nur ein kleiner Hüpfer und der Heli ist wieder wohlbehalten auf den Boden gekommen. Eine weitere Analyse ergab, dass das Problem reproduzierbar war. Sobald bei drehendem Rotor Steuerimpulse kommen steigt der Empfänger aus, was zur abschaltung des ESC führt.
Die einzige Erklärung hierfür war, dass Spannung zusammenbricht und deshalb der Empfänger resettet. Da ich ja bereits alles auf HV ausgelegt habe habe ich dann einfach mal den Lipo direkt angeschlossen und siehe da, das Problem war behoben.
Also hier mein Tip: Nicht beim Bec sparen und denken das bei so einem Heli ein 10A BEC ausreicht. Die Brushless Servos scheinen doch etwas leistungshungriger wie die guten alten S3152 zu sein.
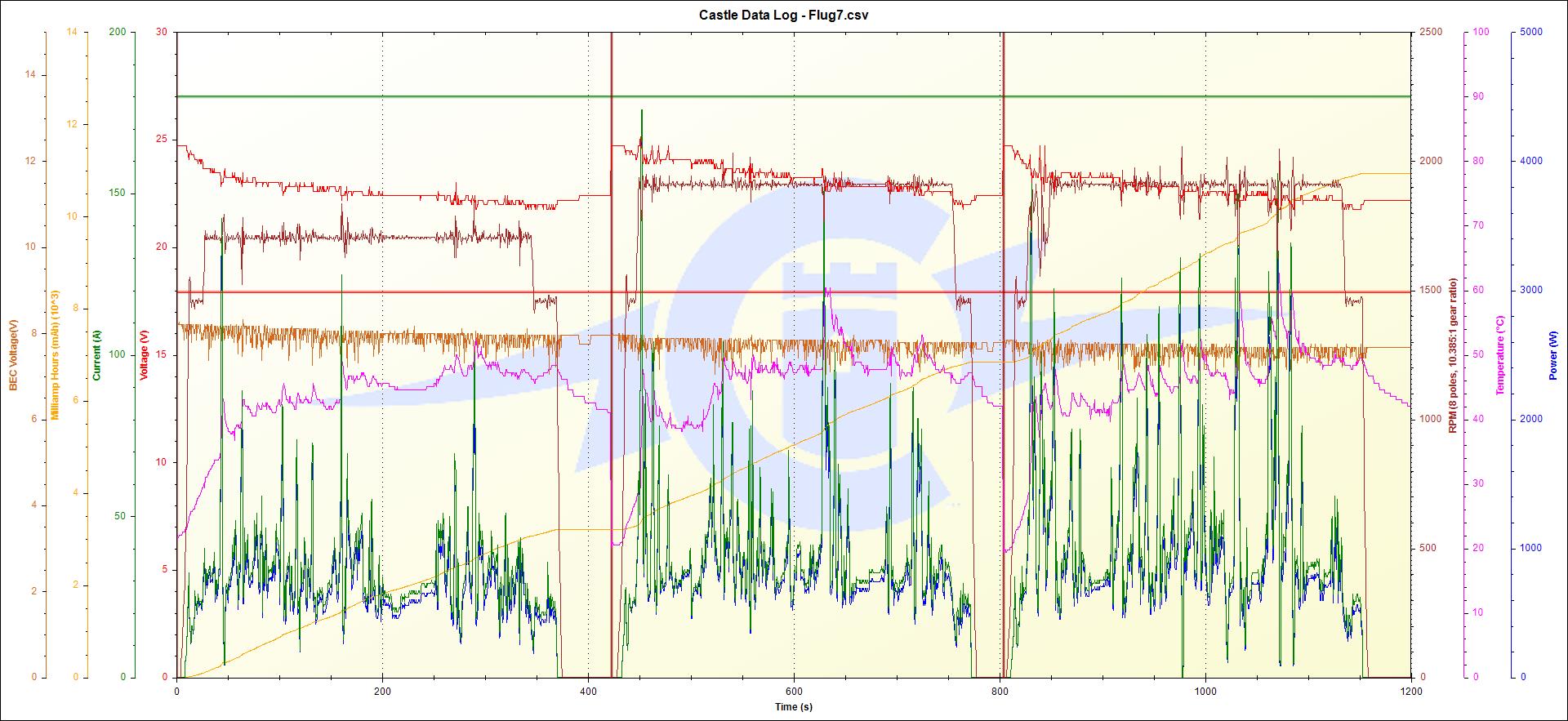
Mittlerweile hat der X50e bereits einige Flüge hinter sich und er macht einfach nur Spaß. Mittlerweile überlege ich nur ob ich nicht doch auf 12s umsteige, da Leistung bei 6S ja doch recht begrenzt ist und wenn man beherzt in die Knüppel greift, die Stromwerte sehr in die Höhe schnellen. Der OBL 44/11-30 ist da auch nicht grade kleinlich. Im Log des CC Edge sind bei großen Loops locker mal spitzen von bis zu 176A zu bestaunen.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}